
Research
TOC
河口研究室では,実世界から取得可能な様々なデータを扱って研究を行っています. 主に以下のようなデータを対象にしていますが,必要に応じて画像やウェブサイトデータなども幅広く取り扱っています.
- 人の行動(慣性データ・チャットログなど)
- 人流データ(GPSログ・Wi-Fiログ・ゲート通過ログなど)
- 公共交通の運行実績(バス・電車など)
研究グループは現在大きく4つに分かれています.詳細は各チームのページを参照してください.
Urban Data [UD]
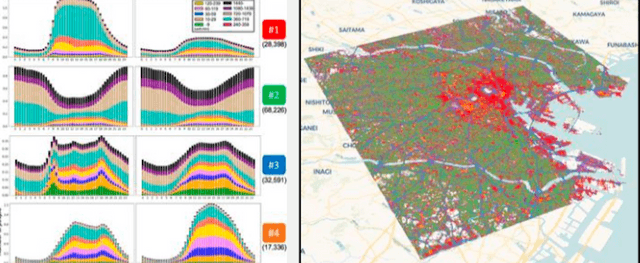
本研究室には,スマートフォンから収集された大量の位置情報データを使える環境があります.このデータを活用し,自然言語処理や画像処理などの幅広い技術を応用することで,「都市形態の把握」,「人々の属性推定」,「人々の移動推定」といった研究を行なっています.この研究は,都市計画やマーケティングといった分野の基盤になり得る重要なものです.
Human Computer Interaction [HCI]
HCIグループでは,「人間とコンピュータのインタラクション」に関する複数のプロジェクトを行っており,人々の生活を便利に,また豊かにするための研究に取り組んでいます.現在は,遠隔ロボット操作によるVRメタワーク,遠隔コミュニケーションにおけるInternet of Realitiesに関する研究を行っています.
物流倉庫支援研究(Warehouse Research)
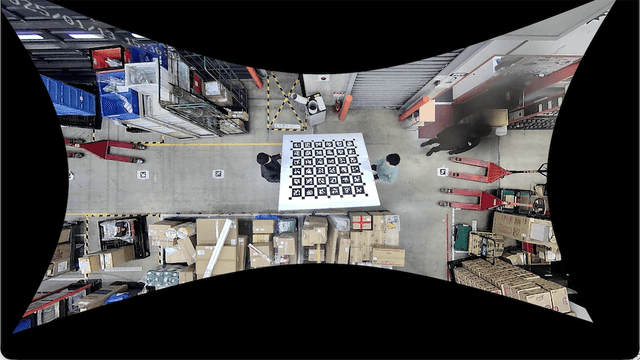
Warehouse Research では,物流倉庫を対象として, センシング・認識・最適化・データ活用を通じた業務支援および現場改善に関する研究に取り組んでいます. カメラやスマートフォン,無線センサなどの多様な情報源を活用し, 作業員や荷物の状態,作業プロセスを把握・可視化することで, 物流現場における生産性向上や業務効率化を目指しています.
その他の研究分野(Other Research Fields)
Other Research Fields では,倉庫・都市といった特定ドメインに限定されない,実世界データを対象とした多様な研究に取り組んでいます. センシング,3D モデリング,データ圧縮などの基盤技術を中心に,実運用を意識した手法やシステムの研究開発を行っています. これらの研究は,建築,ロボティクス,シミュレーション,データ基盤など,幅広い分野への応用を視野に入れています.
その他・関連プロジェクト
Synergic Mobility
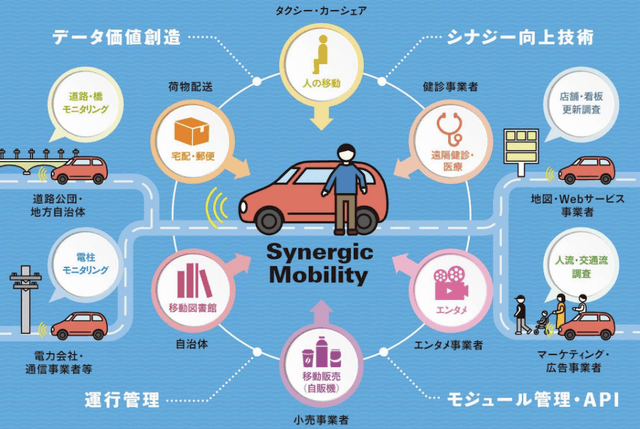
上記4テーマのすべてに関わるプロジェクトです.自動運転車が日常的に走行する世界における,人流・物流の新しいかたちを目指しています.自動運転車による環境認識や,都市レベルの大規模な人流シミュレーションなどが含まれます.
HASC

HASCでは、「人間行動理解のための装着型センサによる大規模データベース構築」を目指した活動を行います。2009年7月別府で開催された情報処理学会 DICOMO2009シンポジウムにて賛同メンバーを集い活動を開始しました。現在は、非営利任意団体として活動しています。
2020年度の研究グループ
アーバンコンピューティング
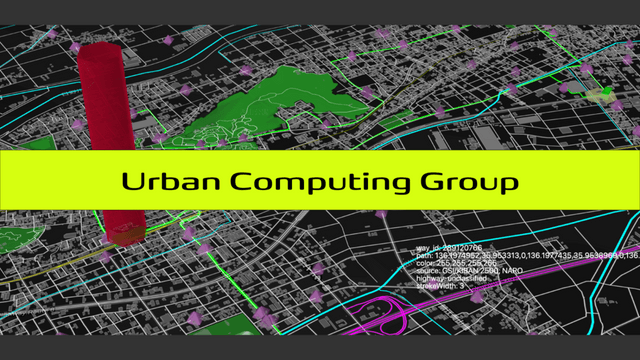
アーバンコンピューティンググループでは,エリアレベル・都市レベルといった広範囲を対象に,より効率的で快適な生活を実現するための研究を行っています. バスの運行実績のような交通に関するデータ,パケットセンシングやGPS・カメラで得られる人流に関するデータの分析が主となっています. また,都市レベルの大規模人流交通流連携シミュレーション基盤の開発も行っています.
アフェクティブコンピューティング
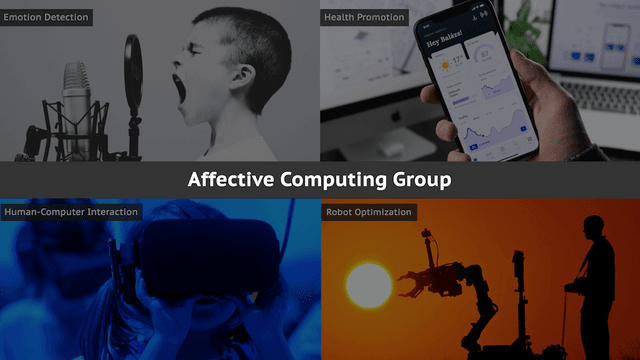
アフェクティブコンピューティンググループでは,人間の感情や感性を分析することでコンピュータ,ロボットと人間が共存,協調する社会を実現するための研究を行っています.現在は,感情的返答を行う対話システム,ピッキング作業者と配送ロボットの最適化など,様々な領域に応用できる研究を行っています
ヒューマンセントリックコンピューティング
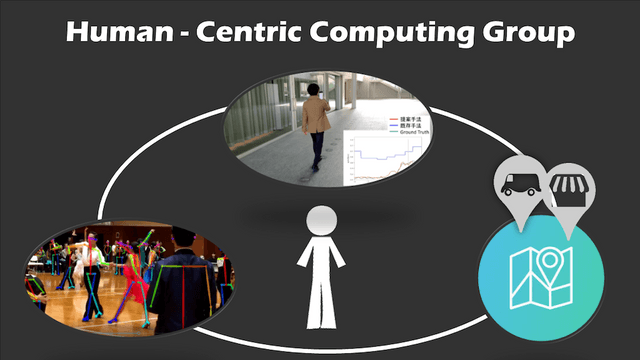
ヒューマンセントリックコンピューティンググループでは,「人間を中心にした技術開発」の考え方に基づき,人々の生活を便利に,また豊かにするための研究を行っています.現在は,慣性センサを用いた屋内位置推定手法,マルチモーダルセンサによるダンススポーツ動作認識,ユーザの位置情報を用いた行動特徴の分析などを行っています.
2019年度の研究グループ
コンテキスト推定
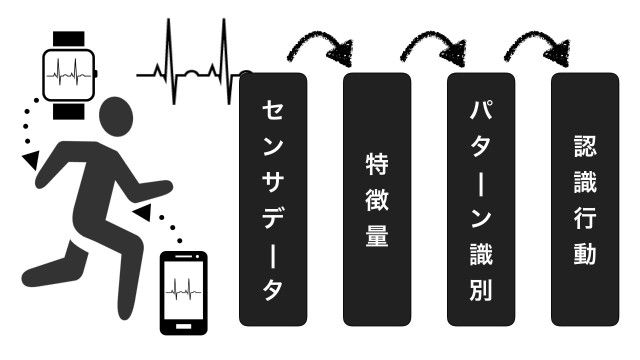
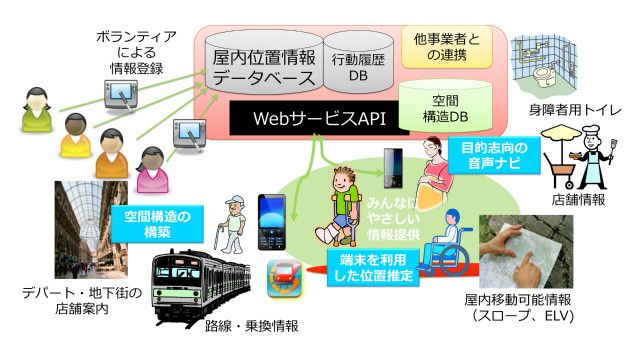
コンテキスト推定チームでは,スマートフォンやBluetoothデバイス,磁場を発生させるデバイスなどを用いて,日々の行動からセンサデータを収集し,「人の行動の認識」や,置かれた環境の推定をするための研究を行っています.より詳細には,歩く・座る・階段を登るなどの行動の高精度な認識や,GPSを利用できない屋内(建物内や地下街)における端末の位置などを推定します.これらの技術は,私達の持つデバイスが私達の置かれた状況を適切に把握し,最適な情報を提供するために重要です.
3次元情報処理
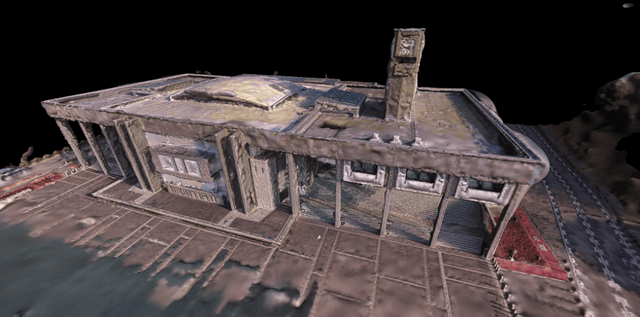
3次元情報処理チームでは,「環境を理解する人工知能」の研究に取り組んでいます.センサの計測情報やインターネット上の大量のデータからコンピュータに環境を自動で認識させ,空間マップの自動更新・シーンコンテクストの理解などに取り組んでいます.画像処理・ディープラーニングなどの技術を用いて,3次元モデリングや変化検出・シーン認識・傾向分析などを行っています.
超スマート社会
超スマート社会チームでは,交通に関する様々なデータの分析や,人流に関するデータの分析を行い,「人・モノの移動をより効率的なものにする」ことを通しての社会の超スマート化に取り組んでいます.バスの運行実績データからの遅延予測,需給の概念を導入した社会基盤システム,などの研究を行っています.