
CAV
TOC
CAV (Connected Automated Vehicles) Group is focusing on technologies that are related to human-robot collabotation, multi-robot navigation, and environmental sensing using automated vehicles.
Optimization of Human Workload using Simulation of Warehouse Collaborative Robot
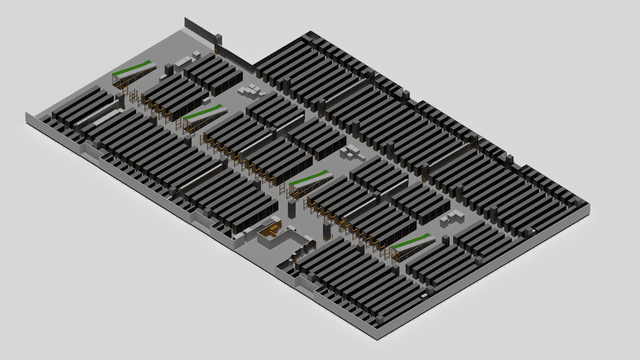
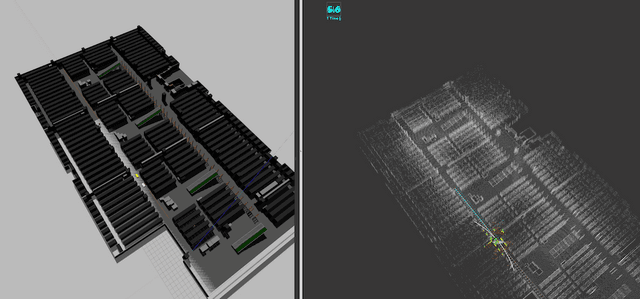
The purpose of this research is to categorize and develop collaborative mobile transport robots in warehouses. E-commerce sales have been growing rapidly in a global scale. The number of accidents with robots involving humans is increasing whilst warehouse automation technology has been developed and implemented in many warehouses. In an environment where people continuously work with robots, robots need to be controlled taking into consideration of the thought that people could be nearby the robots anytime. This research categorizes behaviors of warehouse mobile robots and evaluate these behaviors in a simulation-based environment. We've also conducted several experiments on an actual warehouse.
Environmental Sensing
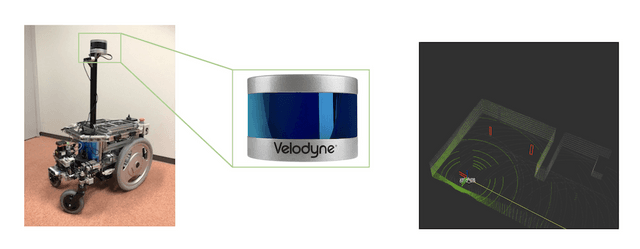
This research focuses on sensing human movements using LiDARs on mobile robots. We aim to navigate robots autonomously in order to capture dynamic human movements and predict them at the same time.
Efficient Path Planning for Multi-Robot Navigation
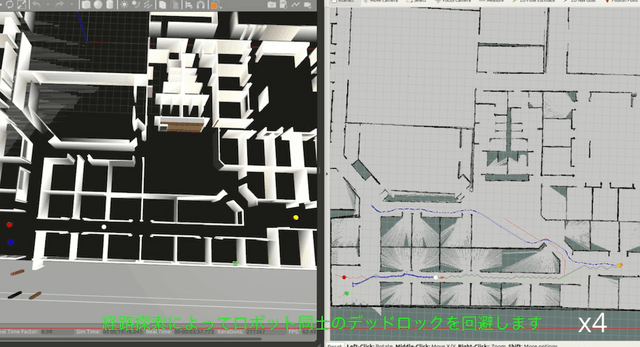
Autonomous mobile robots (AMRs) can run autonomously using only their onboard sensors such as cameras, LiDAR, and IMUs. However, by communicating with infrastructure and other robots, more advanced autonomous driving can be achieved. In this research, we study communication methods and path planning algorithms for autonomous driving that does not prevent humans or other mobile robots from moving. We are also conducting simulations and experiments using actual AMRs.